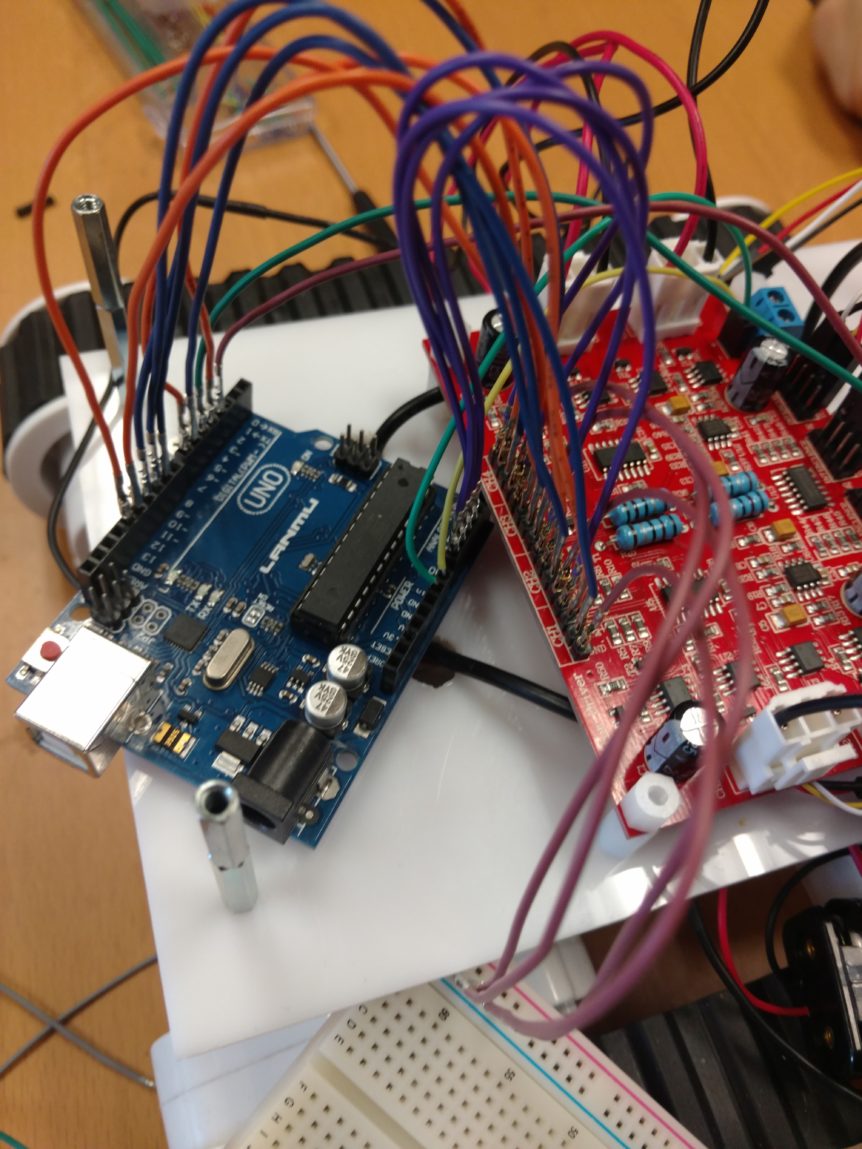
This weeks last meetings had us working on the development of the Rover5 platform. We reverse-engineered the existing model, and built up a second- however the wiring posed a challenge. It was unclear about the orientation of the robot chassis (front/back) due to the design of the kit. This led to some issues when drilling the holes in the laser-cut boards for the body. In addition to these issues, once we had the motor driver installed, there was no wiring diagram for us to base off of. We plugged things in and clipped them down where we ~believe~ they should go, however we are not sure. The IOIO was more of the same. After soldering maybe 40 pins on the back of the IOIO unit and wiring it up to the motor driver and power source based on what we believe to be the correct method, there was no power. We then tested the IOIO individually, and it worked the way we wanted it to- therefore it must have been either in our wiring or the motor driver. We spent 2 hours on Friday morning troubleshooting the wiring and trying different wiring diagrams we found on the web- even resorting to trying an Arduino. Nothing worked- however, we are not giving up. We contacted the original designer of the Rescue Robotics Rover 5, and he said he is available to come in and help us after break- we hope to be up and running by then.